
Sur internet on trouve pour quelques dizaines d’euros des nacelles stabilisatrices à base de moteurs brushless et de contrôleur « inspiré » de celui d’AlexMos. Le plus souvent en 2 axes ils sont conçus pour stabiliser une gopro sous un multirotor. J’en ai plusieurs et je dois avouer qu’elles sont très efficaces.
On peut laisser les axes fixes (roll et tilt) mais le contrôle du tilt est une option très intéressante, le mouvement est très fluide. Pour ce faire il faut connecter une voie PWM sur une pin du contrôleur. C’est là qu’il faut trouver une solution car le plus souvent on utilise un petit récepteur 4 voies avec sortie PPM pour n’avoir qu’un seul fil entre le RX et le contrôleur de vol qui se charge d’extraire toutes les voies. Optimisation, moins de fils, moins de grammes …
Oui mais voilà, il faut bien récupérer une voie pour l’envoyer à notre contrôleur BGC.
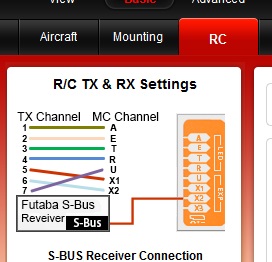
Avec un RX de type FrSky X8R
 Là c’est le plus simple, si on dispose de la dernière génération de TX/RX FrSky, on envoie le sbus au contrôleur de vol, et on connecte tout simplement la voie 8 par exemple au contrôleur de la nacelle. Ce récepteur a l’avantage de proposer une sortie SBUS et simultanément les 8 premières voies indépendantes en PWM.
Là c’est le plus simple, si on dispose de la dernière génération de TX/RX FrSky, on envoie le sbus au contrôleur de vol, et on connecte tout simplement la voie 8 par exemple au contrôleur de la nacelle. Ce récepteur a l’avantage de proposer une sortie SBUS et simultanément les 8 premières voies indépendantes en PWM.
Avec un RX de type FrSky D8RIIplus ou XP
 Avec un récepteur D8RXP lorsqu’on relie les pins des voies 3 et 4, les sorties 1 et 2 délivrent respectivement la sortie PPM et RSSI. Et les voies 5 à 8 peuvent être récupérées en PWM, on se retrouve donc dans la même configuration qu’avec un X8R.
Avec un récepteur D8RXP lorsqu’on relie les pins des voies 3 et 4, les sorties 1 et 2 délivrent respectivement la sortie PPM et RSSI. Et les voies 5 à 8 peuvent être récupérées en PWM, on se retrouve donc dans la même configuration qu’avec un X8R.
Le D8RII+ ne propose pas d’origine la possibilité d’avoir la sortie PPM mais on peut le flasher avec le firmware du XP… Méthode sur RCGroup
Avec une FC DJI Naza
 C’est la configuration la plus contraignante car avec cette FC on ne peut pas assigner les voies. Les voies
C’est la configuration la plus contraignante car avec cette FC on ne peut pas assigner les voies. Les voies
- 1 à 4 pour ailerons, profondeur, gaz et dérive
- 5 et 6 pour IOC, paramètres ou gimbal
- 7 pour le mode de vol
En sortie on a F1 et F2, des sorties pour servos de nacelle car les cartes naza peuvent piloter une nacelle mais je n’ai jamais obtenu de bon résultats. Il faut récupérer sur l’une de ces sorties le signal original de la voie X1 ou X2. Si on utilise l’ioc le choix sera évidant: il ne reste plus que X1. Il faudra activer la fonction gimbal et mettre les gains à 0 pour récupérer le signal d’entrée de la voie 5 qu’on récupérera sur la sortie F2 qui sera connectée à la commande du tilt sur la nacelle brushless.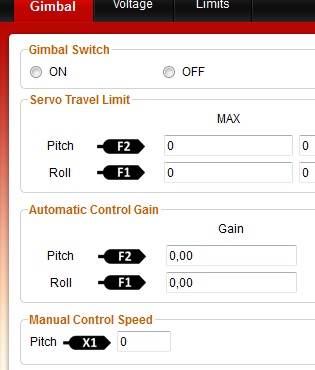
Avec une FC APM
La solution la plus souple. Tout est expliquer ICI.

En gros, on peut régler l’entrée qu’on veut pour la diriger vers la sortie qu’on veut, soit par les fonctions prévues pour les nacelles soit par le paramétrage où l’on trouvera la fonction RC passthru.